Implementing Waypoint Navigation
STEP 1 : Drone Setup
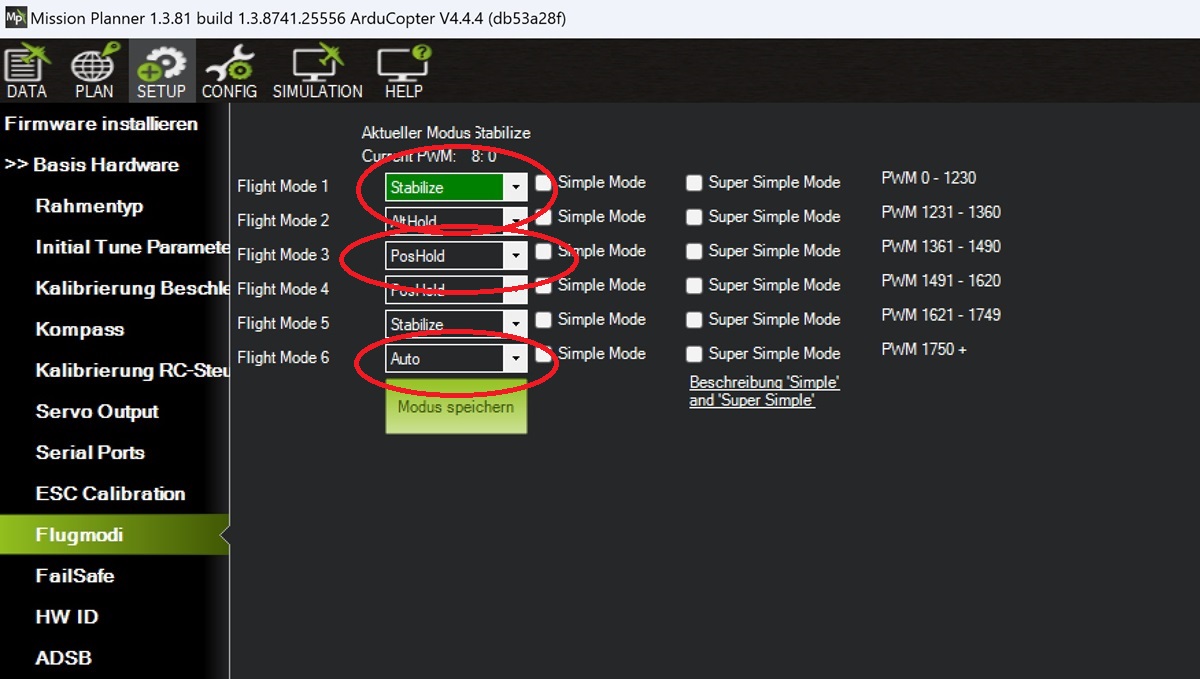
In the flight controller, channel 5 is used for arming and disarming, channel 8 is used to switch the flight modes:
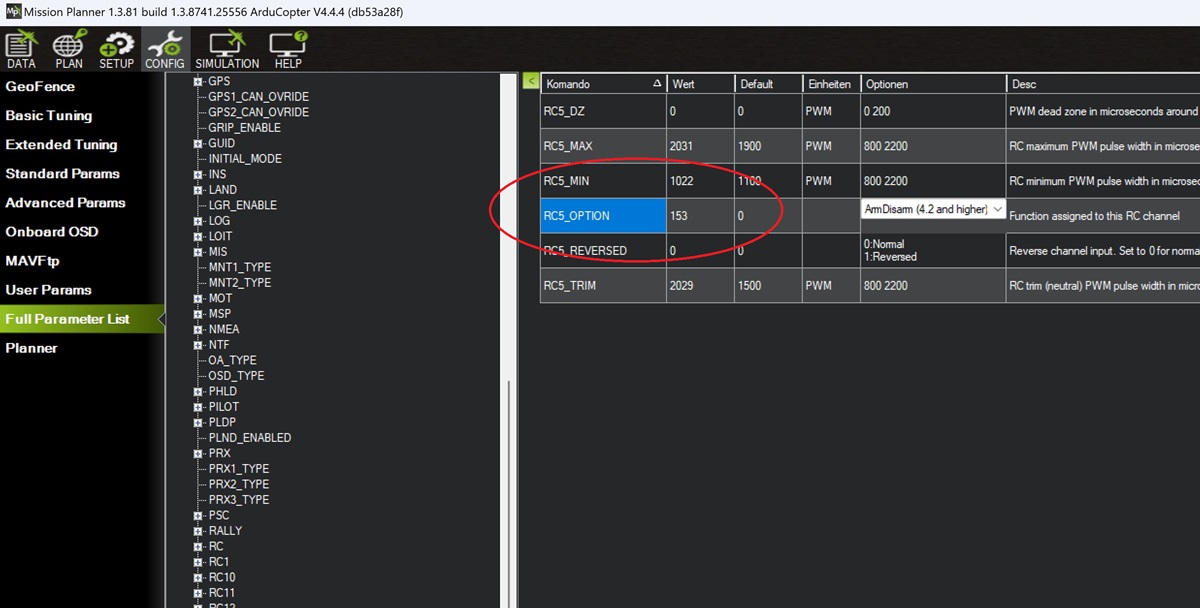
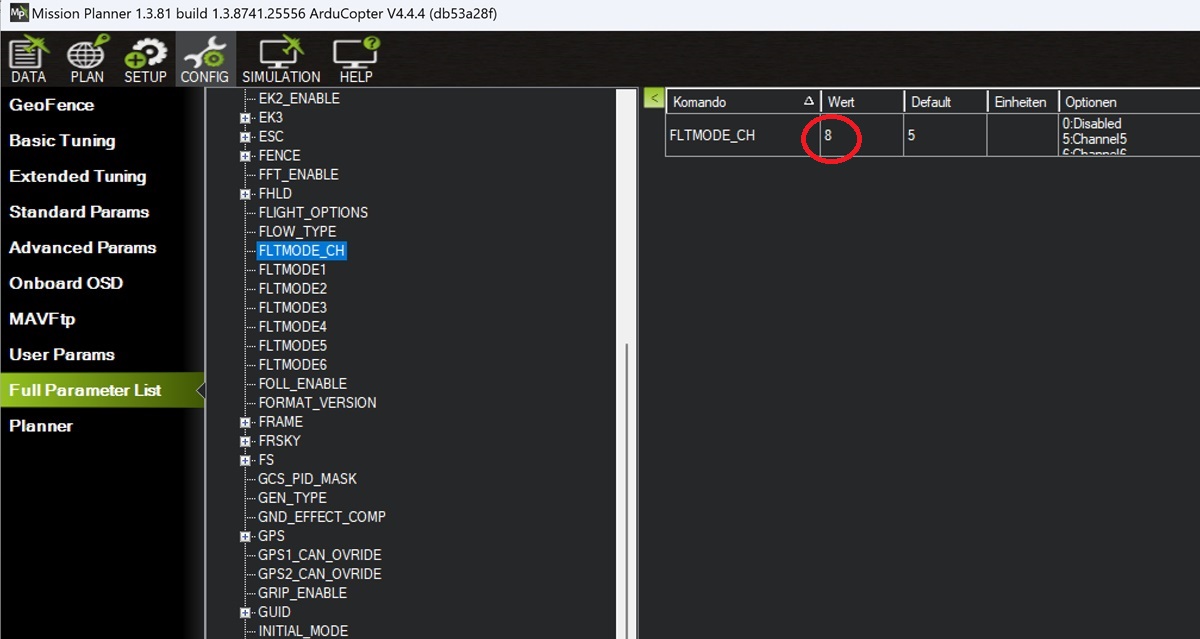
FLTMODE_CH = 8 RC5_OPTIONS = 153
STEP 2 : Mission Planning
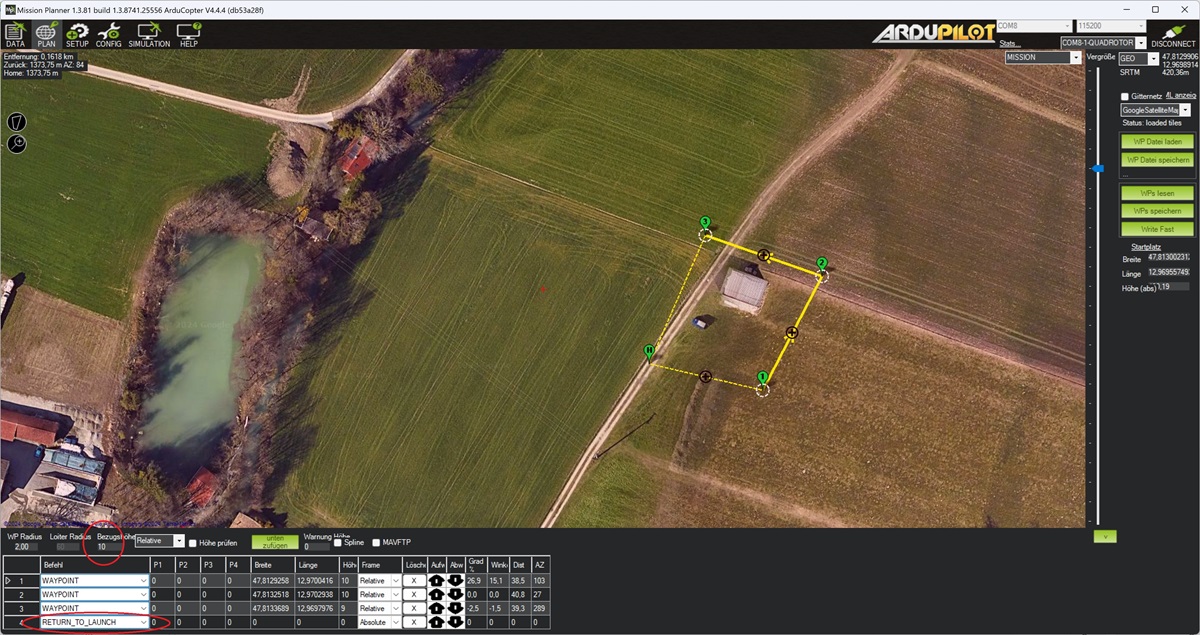
Use Mission Planner to define waypoints and actions: For the first test flight, i defined a very short flight in which the drone always stays close. The most important thing is that you can switch off the drone in an emergency using the remote control (disarm).
I have only entered 10 meters as the height above ground, which is also for safety reasons. I have set RETURN_TO_LAUNCH as the action for the last waypoint, which means that the drone automatically returns to the take-off point when it reaches the waypoint and also lands automatically.
STEP 3 : Test Flight
This is a video of my very first flight with waypoint navigation.