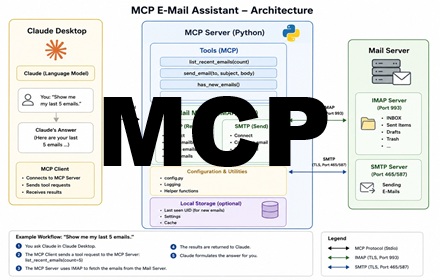
Simple MCP Email - Assistant
Haven't you always wanted to be able to talk to important programs—like your email program—in natural language? This tutorial shows how to implement a simple MCP server for communicating with IMAP and SMTP mail servers.

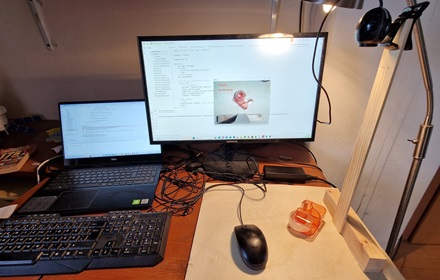
Simple AI Classifier
This tutorial is an easy introduction for anyone who wants to learn more about AI and artificial neural networks. A small data set is used to train the recognition of handwritten digits. A simple NN network with only one hidden layer is sufficient for this application.
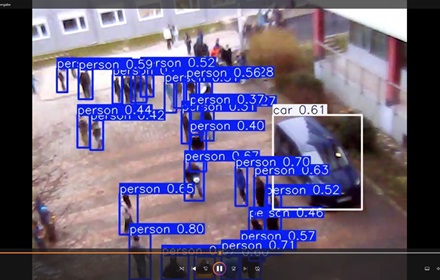
Object Detection with YOLO
This tutorial is about recognizing objects in images or video streams. The YOLO framework is used for this purpose. YOLO offers a very simple and extremely high-performance option for object classification.
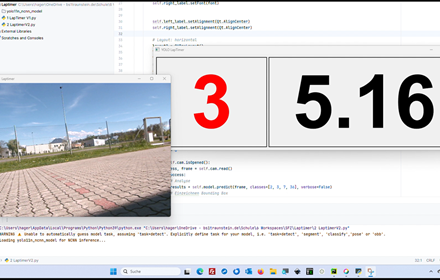
Free AI Laptimer for RC Cars
Would you like to become a better RC car racer and measure your lap times? But you'd prefer it to be free? I'll show you how you can build a lap timer for 0 €. It's really easy too!
AI-Based Waste Separation
A neural network is trained to separate waste based on camera images. The tutorial describes the entire process, from training to real-world application. The AI framework used is PyTorch and the dataset is "BetterRecycling".
J.A.R.V.I.S.
Wanna be able to talk to your computer? JARVIS it is a prototype for a command control by speech recognition which is based on a pre-trained artificial neural network. It is able to recognize and respond to spoken commands in real time.